Всем, кто имеет дело с тренажерами ЖД подвижного состава, сталкиваются с тем, что производители тренажеров никогда не вводят в их состав блоки индикации реальных устройств (например от КЛУБ-У, САУТ, САВПЭ и т.п.). В результате тренажер получается красивый , но несколько ущербный. Производителей понять можно - им проще нарисовать на экране монитора и все , дело сделано. В таком случае теряется ощущение работы реальных устройств, управление ими с помощью кнопок и т.п. При этом ощущения работы с кнопками отсутствует напрочь, т.к. кнопки типа 'тыркалка в экран', это не тоже самое, что реальная клавиатура, например от КЛУБ-У.
В качестве подопытного тренажера был использован тренажер ЭД4М фирмы Зарница. Фирма выпускает полную лажу, по крайне мере именно такой вариант нам достался в 2012 году. Пришлось полностью переделать ПО - 3D и математику, т.к. имеющееся ПО математики при поставке ни в какие ворота не лезла. 3D , получилось не супер, но учитывая, что было сделано за 2 месяца вполне даже супер. С новым ПО используем в учебном процессе по назначению с 2015 года. При переделке пришлось отказаться от рисования блоков индикации КЛУБ-У и универсального пульта УПУ-2 (к 2016 году сделано). Слишком затратно , а выход для начального обучения небольшой - ограничились типовой АЛСН и 3СЛ2М. Но со временем пришло понимание необходимости, что для студентов, переставших судорожно дергаться от типовой АЛСН, нужен работающий БИЛ
Задавшись целью подключить к тренажеру БИЛ-В из составf КЛУБ-У, пришлось поломать голову и изрядно перелопатить кучу информации, в том числе накопленную за 15 лет по КУРС-Б и CAN из разных источников.
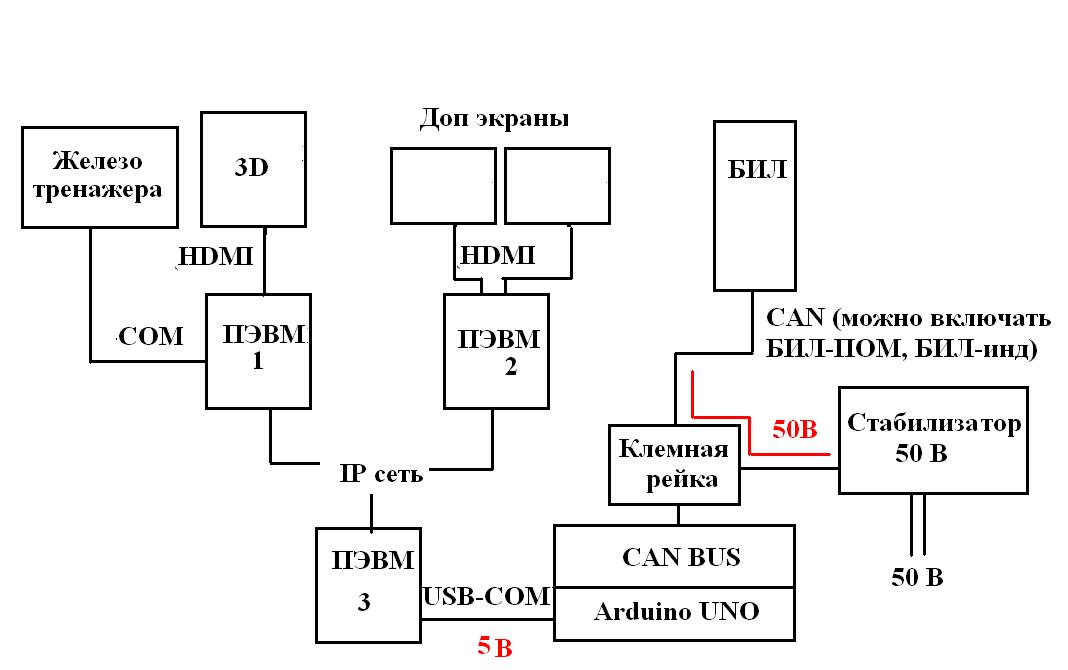
В результате пришло такое решение - БИЛ подключается к отдельному компьютеру (хотя можно все повесить и на один) с помощью связки железа:
ПЭВМ виртуальный COM <=USB=> Arduino UNO <=SPI=> Arduino CAN bus <=CAN=>БИЛ-В
для ПЭВМ, Arduino UNO пришлось составить оригинальное ПО.
Самое сложное оказалось подобрать параметры CAN сети в которой работает КУРС-У , к удивлению он работает на очень низкой скорости - 25Кб. Нельзя сказать, что при подобранных параметрах работа CAN и БИЛ супер стабильна, но вполне терпимо, хотя периодически идут сбои. Точные параметры работы CAN неизвестны и нигде не публикуются.
Кто знает точные параметры работы CAN для КЛУБ-У (БЛОК)сообщите, если это не секрет ............
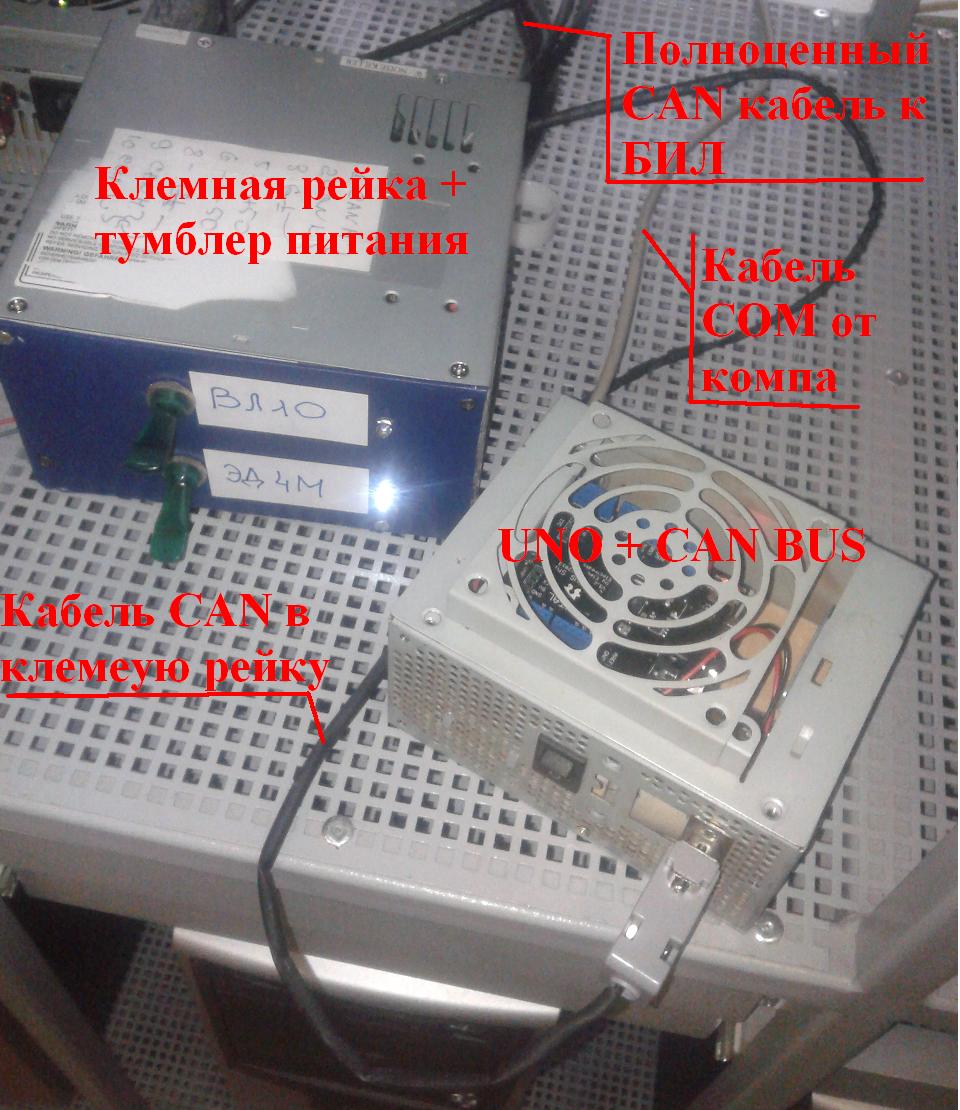
| Общая схема тренажеров | Аппаратный блок с ПЭВМ |
 |
 |
| Клеммная рейка | CAN BUS + Arduino UNO |
 |
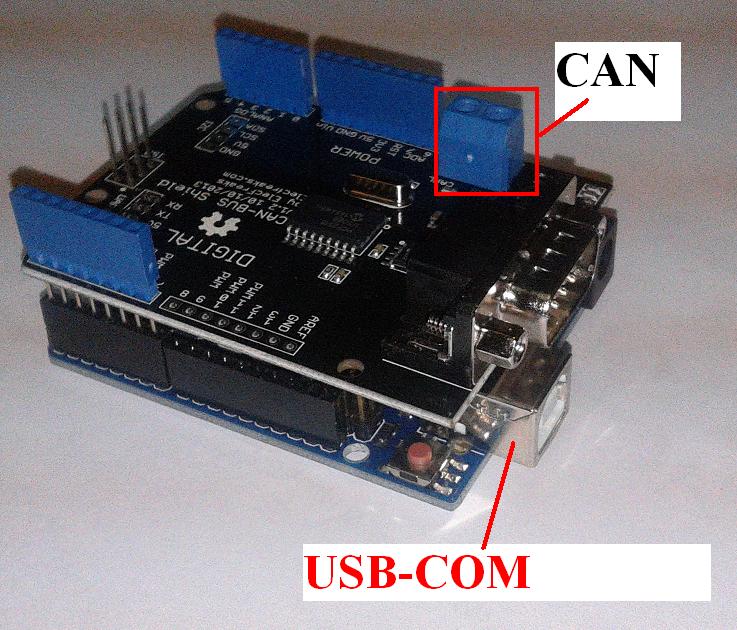 |
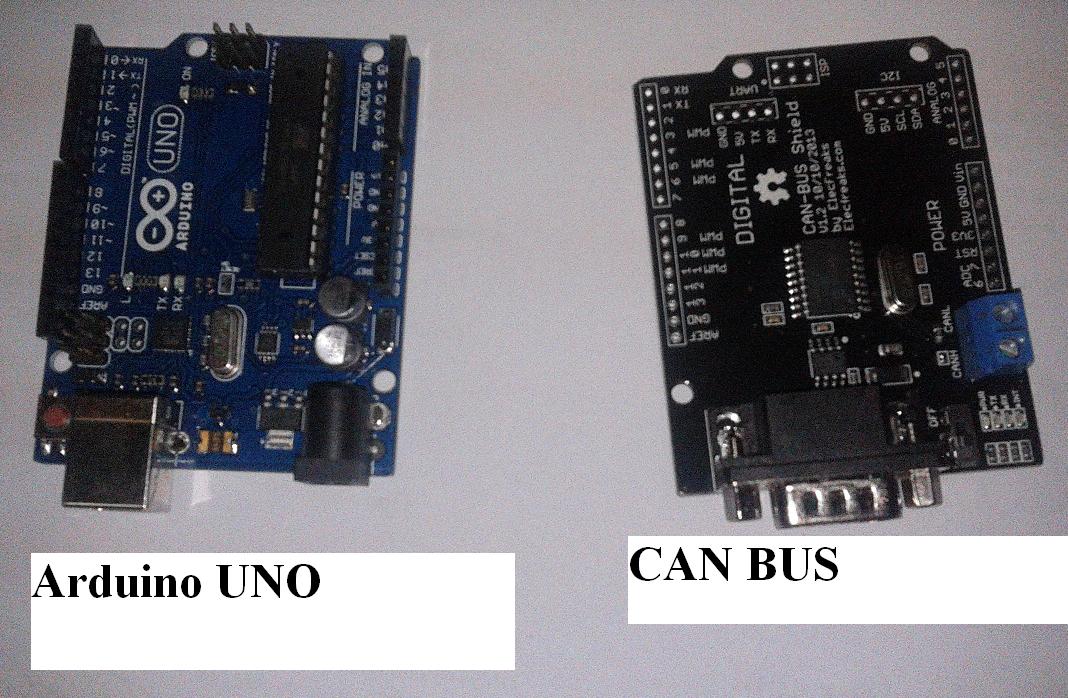
| CAN BUS и Arduino UNO в отдельности |
Софтовский драйвер БИЛа |
 |
 |
| ЭД4М на базе пульта от Зарницы | ВЛ10 на базе пульта ПКБ ЦТ |
 |
 |
| Шильдик на пульте ВЛ10 (раритет): №1 от 08.1995 года |
 |
О дополнительной информации пишите .....
